
视比特机器人:最聪明的桁架控制器——SpeedTruss正式发布
文章作者:长欣小编 人气:发表时间:2023-04-18 09:51
随着智慧工厂的广泛建设,桁架机器人在制造、物流等环节中的作用日益凸显。当前大部分工厂仍采用传统PLC(可编程逻辑控制器)来控制桁架,仅能实现简单场景下的桁架运动控制功能,难以支持复杂作业环境以及动态任务场景下多臂桁架机器人的灵活高效控制。且PLC编程开发周期长、成本高、调试难,无法实现快速交付。

针对以上亟待解决的难点,视比特机器人推出了国内首款多臂智能桁架机器人控制器——SpeedTruss,以最优运动规划突破传统桁架自由度限制,实现了多臂共轴桁架机器人在复杂环境、复杂任务下的自动规划、主动避障、敏捷执行,适应全场景柔性生产需求;同时支持低代码灵活开发,极大地简化了开发流程,大幅缩短了投产周期,为工厂智能化水平和生产效率的提升带来质的飞跃。

SpeedTrussvs传统PLC
1
PLC在控制桁架柔性作业时遇到的挑战
SpeedTruss全解读

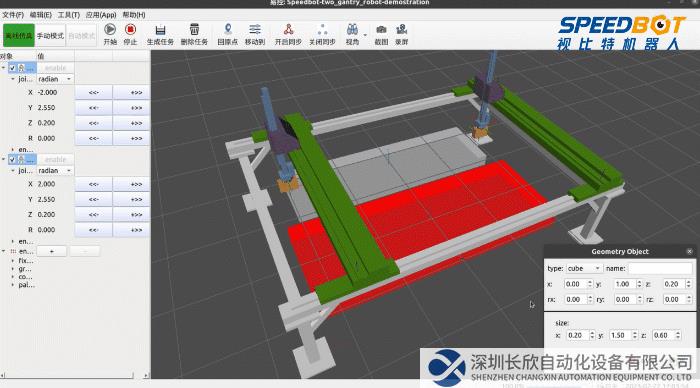
SpeedTruss智能桁架控制器主要用于多臂共轴桁架机器人(N≥1)的运动控制,运用自主研发的桁架运动规划、多臂协同运动控制、无碰运动协调等算法技术,为智能产线提供灵活、精准、高效的多臂桁架运动控制方案。用户只需调用控制器提供的高级任务指令接口(如将某台桁架臂移动到目标位置K),即可实现对桁架机器人运动轨迹的自动控制与协调,保障各个桁架臂高效无碰协同运动,有效提升生产效率。
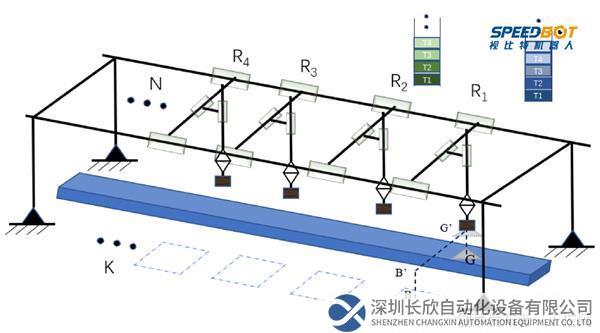
多臂共轴桁架机器人运动控制简图
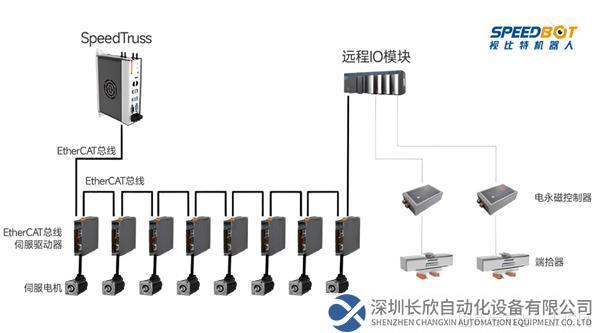
△ 电气连接关系
最优运动规划,无需人为示教
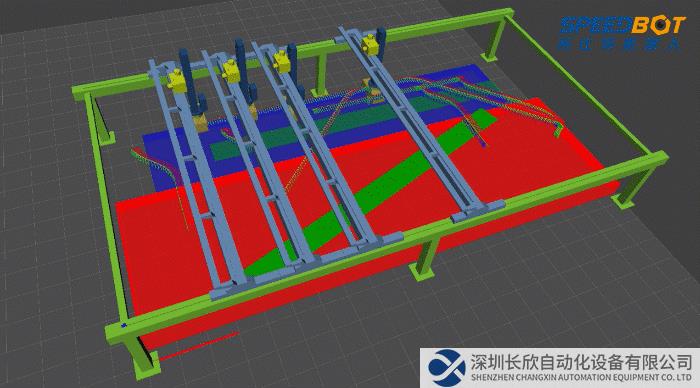
动态任务下调整零件姿态
针对多臂协同作业场景,自研多机无碰路径规划与协调算法,通过精确计算桁架机器人各个臂的无碰运动轨迹,并最大化地调度各个桁架臂同时运动,实现多臂桁架高速、灵活作业。
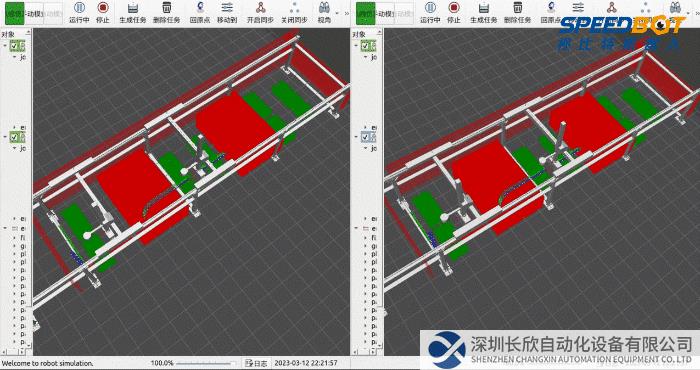 双臂桁架场景主动避让障碍物
双臂桁架场景主动避让障碍物
在线优化任务分配,整体效率提升20%~35%





同类文章排行
- 万马高分子助力,国内首条公里级大长度环保
- 主营产品有哪些?
- 购买后产品发什么快递?
- 节能转型,电机产业链有哪些变革性机会?
- 更紧凑而高效的机器人世界
- 机器手臂的创新应用:轻薄短小、智能高效
- 产品供货周期需要多久?
- 当半导体碰上 AMR,来一场智能化的精彩
- 坚持科技是第一生产力
- 通向智能工厂的硬核技术,哪些和你有关?
最新资讯文章
- 英孚康是罗克韦尔的替代品?不止如此
- 欧洲航天局利用MVG设备大幅增强新型 H
- Profinet转canopen网关连接
- DATALOGIC得利捷 | 物流之眼利
- 施耐德电气与标领智能装备强强联合,共创电
- 【有现货】KB-LS10N-C KB-L
- 华北工控打造网安专用主板,基于飞腾D20
- PLC通讯革新:EtherNetIP转P
- 华北工控ATX-6152:高度集成化!提
- 巴斯夫成功完成Ethernet-APL试
- HRPG-1000N3 系列:1000W
- RQB60W12 系列:60W 1/4
- NPB-450-NFC 系列:450W
- VFD 系列:150W~750W 工业用
- NGE12/18 系列:12W/18W
- 工业现场ModbusTCP转EtherN
- DJM / FT系列:12V/38~15
- SI06W8/DI06W8 系列:超宽压
- NGE100 (U) 系列:100W 环
- LOP-200/300系列:200W &